Adding Waypoints and Geofences¶
The GCS has two click-to-place panels in Foxglove:
- Waypoint Editor — drop ordered 3D waypoints for the Navigate task.
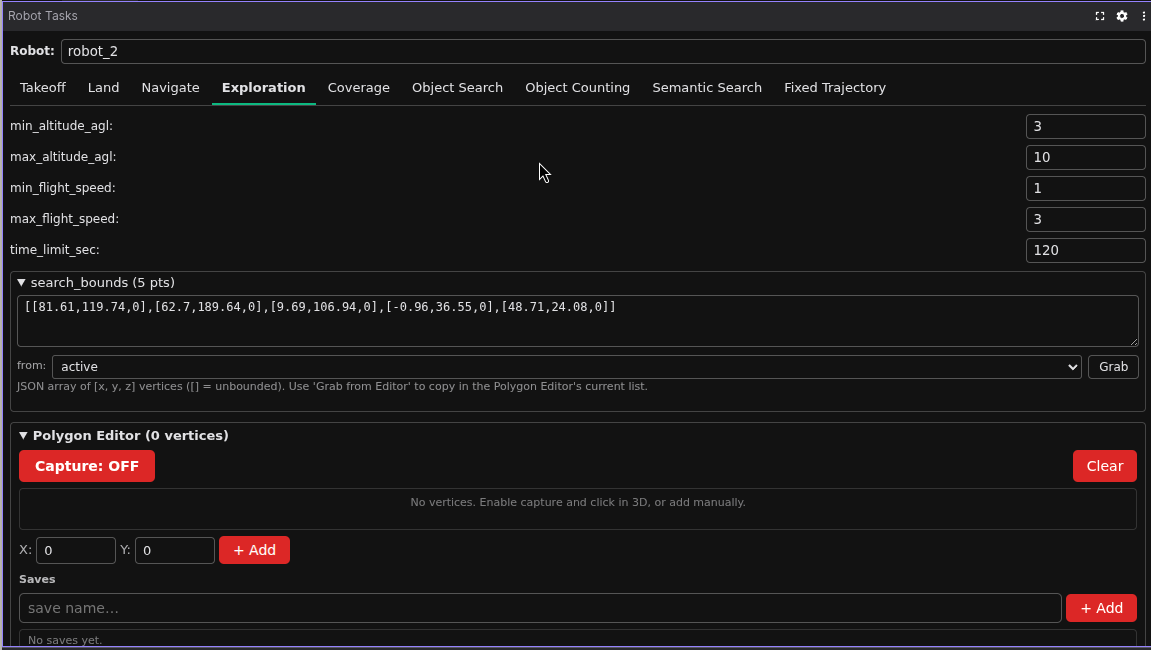
- Polygon Editor — drop vertices of a 2D area to use as a geofence / search bounds for the Exploration and Coverage tasks.
Both panels work the same way: enable click capture then click in the 3D panel to place points.
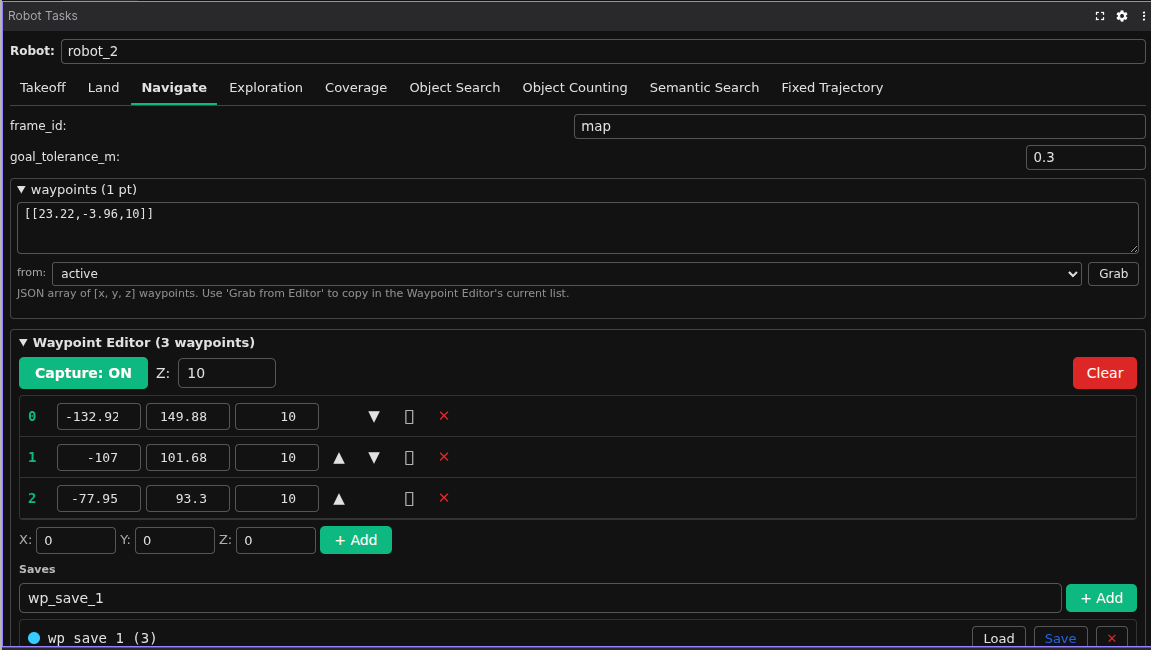
The two editors live inside the Robot Tasks panel — the Waypoint Editor appears under the Navigate tab, and the Polygon Editor appears under the Exploration and Coverage tabs (where it feeds the search_bounds field).
End-to-end demo: enabling click capture, dropping points, saving the set, then sending it to a robot.
Place points¶
- In the editor panel, toggle Enable click capture on.
- (Optional) In the top right of the 3D panel, switch the camera to a top-down view to make it easier to drop points on the ground plane.
-
In the 3D panel toolbar, click the Publish tool (top right, ▷ icon) and switch its mode to Publish 2D point (/clicked_point) — this is what sends clicks to the editor.
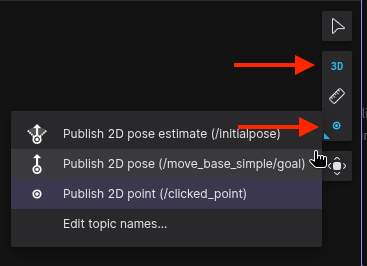
-
Click anywhere in the 3D panel. A red marker appears at the click location. The waypoint editor draws spheres in click order; the polygon editor draws a closed loop.
- The Default altitude field controls the
zcoordinate that gets attached to each click — set it once, then click freely on the ground.
To add a point without clicking — e.g. for a precise coordinate — type values into the + Add row and press Enter.
Reorder, edit, delete or duplicate¶
- Reorder — drag a row up or down in the active list. The marker numbering updates immediately.
- Edit a point — click the row, edit the
x/y/zfields, press Enter. - Delete a point — click the ✕ on the row.
- Clear all — click Clear. Doesn't touch saved sets.
- Duplicate — click the ⧉ icon on a row to insert a copy of that point directly after it. Useful for laying down repeated patterns like a survey grid where each new point is a small offset from the previous one.
For polygons specifically, vertex order defines the perimeter — reorder rows to flip the polygon shape.
Save and load¶
Saves let you name a set of points and bring them back later — the Robot Tasks panel reads the same saves, so a saved waypoint set can be selected as a Navigate target and a saved polygon can be selected as search_bounds for Exploration / Coverage.
Two-step save flow:
- Type a name into the save name… field, then click + Add. The save now exists in memory and shows up in the saves list.
- Click Save on that row to persist it to disk. The button changes to ✓ Saved when the file write succeeds.
Other actions per saved row:
- Load — replaces the active list with the saved one. Useful for re-editing a previously persisted set.
- Delete — removes the save from both memory and disk.
Saves are written to host-mounted JSON files inside the GCS container:
| Editor | File |
|---|---|
| Waypoints | ~/.airstack/gcs_waypoint_saves.json |
| Polygons | ~/.airstack/gcs_polygon_saves.json |
These survive container restarts and can be hand-edited or version-controlled if you want to ship a curated mission set.
Use them in a task¶
- Navigate — in the Robot Tasks panel, select the Navigate tab, pick a saved waypoint set from the from: dropdown (or active to use whatever's currently in the editor), pick a robot, click Send. The Grab button copies the current selection into the JSON
waypointsfield below. - Exploration / Coverage — same flow, but the polygon save fills the
search_boundsfield.
If a save doesn't appear in the dropdown after creating it, click the dropdown again to refresh — the Tasks panel re-reads the latched saves topic on focus.
Troubleshooting¶
| Symptom | Likely cause |
|---|---|
| Clicks don't register | Click capture isn't enabled, or the Publish tool isn't set to Click position |
| Clicks register but no marker shows | The 3D panel doesn't have the editor's marker topic enabled — open its Topics list and toggle on /gcs/waypoints/markers (or /gcs/polygon/markers) |
| Saves don't persist | Host volume ~/.airstack not mounted on the GCS container |
| Save name silently overwrites | Both + Add and Save overwrite by name — pick a unique name |
| Tasks panel doesn't see a new save | Re-open the dropdown to refresh, or restart the panel |
See also¶
- GCS Foxglove Visualization — the multi-robot fleet view alongside these editors
- Coordination Payloads — for sharing custom data fleet-wide