The GCS control panel shows per-robot status: Ping, Recording, and Battery (voltage and percentage when the robot's MAVROS battery topic is bridged to the GCS).
The TAK Architecture looks like follows:¶

Note: Please check out the config file at config.yaml to understand further on how things are setup.¶
Learn how to use the TAK features:¶
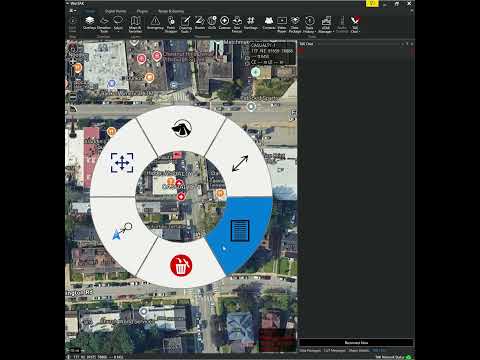
1. Sending Robot Query from the TAK Chat.¶
2. Displaying automated Casevac icons from the casualty inspections:¶
Debugging tips:¶
launch just the gcs container: